
Late last year, Seaward Science was approached by Pelagic Research, a manufacturer and operator of ROVs, to develop a complete operational and navigation software stack for their new Odysseus4k-class ROV. With a compressed timeline of about six months, we used Seaward Science’s RoShip software stack to meet the deadline, and we’re proud to report that the vehicle is now fully operational and actively deployed in the field.
What is RoShip?
RoShip is a comprehensive set of software tools that enables us to quickly create custom software packages for specialized applications in mapping and vehicle control. Built on Robot Operating System 2 (ROS2), RoShip utilizes ROS2 message handling for data formats, with all message formats fully open-source and released under the Apache 2.0 license on GitHub. This open standard ensures that your data logs and streams remain accessible without subscription-based restrictions, allowing for seamless integration with other software packages.
Key Features of RoShip:
- Complete surface and subsea navigation stack
- Graphical User Interface elements and ROS2 connections for rapid UI development
- ROV autonomy drivers (position, heading, and depth hold; velocity control; waypoint navigation)
- Automatic thruster allocation based on vehicle model
- Custom or “off the shelf” joystick support for vehicle tele-operations
- Full sonar mapping stack supporting Norbit and R2Sonic multibeam echosounders
- Export capabilities for multibeam and navigation data to S7K format for easy import into Qimera or MB-System for processing
- De-centralized processes structure allowing UI components, vehicle controllers, and drivers to run as separate processes on multiple machines
Odysseus Commander
The Odysseus Commander is the software suite used to operate the Odysseus4k class ROV. The system is designed to be operated across and engineering station and pilot station with user-configurable touch screens.

The Pilot navigation display features a highly visual situational awareness data all updating at a buttery smooth 60hz+ allowing the pilot to visualize every minute movement at a glance.
- The left half of the screen displays inertial, depth, autos and attitude information
Attitude display showing roll and pitch information- Speed tape [left] showing vehicle speed in m/s fore and aft
- Depth tape [right] displays:
- vehicle depth in m
- seafloor depth [brown rectangle]
- wire beacon position [red rectangle]
- Heading indicator [below]
- Autos targets (heading, speed, depth) displayed in magenta on their corresponding display
- Autos Status displayed [top] in green above the attitude display
- The right half of the display shows the horziontal situational indicator [HSI] which displays
- Ship Heading [grey hull shape and small heading readout 329.7]
- ROV heading displayed on the compass card
- The “Visual Wrap Indicator” which displays wire wraps as a spiral line between ship heading and ROV heading [blue-red gradient line]
- Speed over ground vector shown in green with its forward/lateral components shown in grey
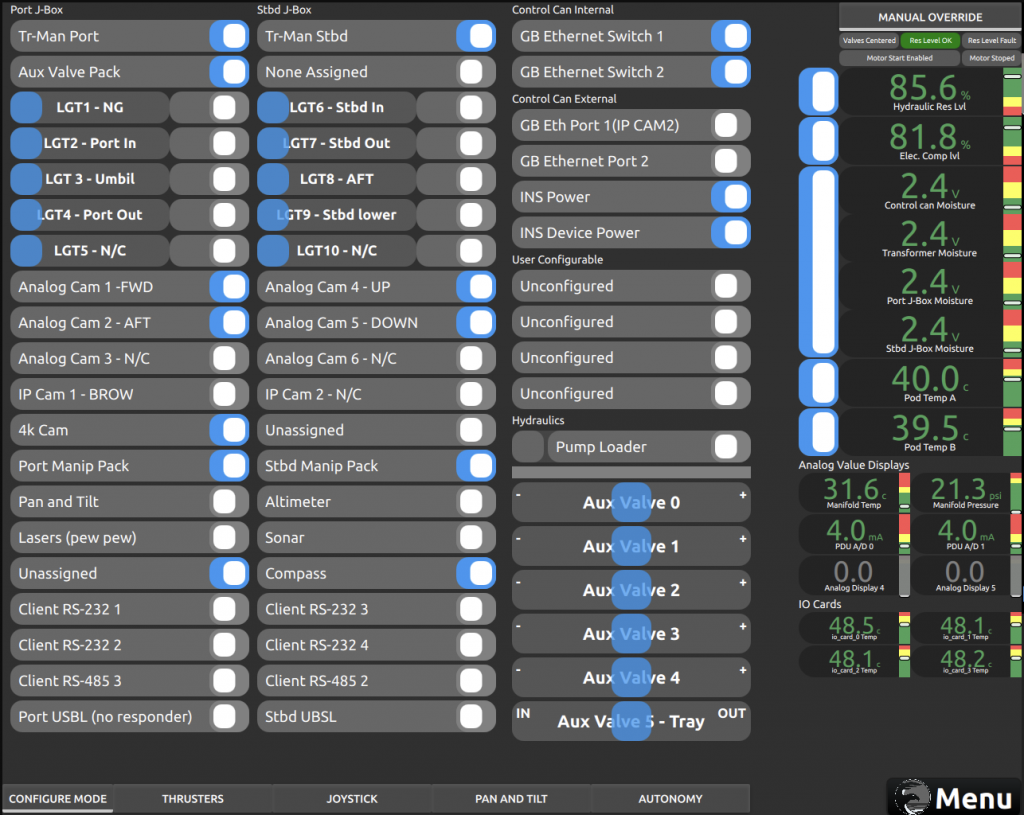
The engineering control panel allows operators to configure and operate all systems directly on the vehicle. A full tour is beyond the scope of this article but you can find a few overview of the features and capabilities in the documentation here: https://krasno.cloud/odysseus/docs/index.html (when prompted enter username: guest , password: odysseusDemo)
Odysseus Commander In Action

3d View with thruster outputs displayed 3d Visualization showing vehicle model and thrust vectors Alternative Controller Testing with built in touchscreen Control Room Pilot View




No responses yet