Nereid Under Ice (NUI) is a ROV/AUV hybrid. It can be remotely operated up to 40km laterally from the ship using a lightweight fiber optic tether. The vehicle can also operate in autonomous mode for specific missions or if the tether should ever break. You can find out a bit more about NUI here.
The mission
For this mission, NUI was to demonstrated a new mode of operation. It was operate in autonomous mode with periodic communications to the surface via a tethered optical modem. At which time, new missions could be uploaded and data can be downloaded from the vehicle. These missions included mapping operations which is where Seaward Science comes in.
The NUI team had some unique requirements for maps. The first requirement was data compression. In order to plan the next part of the mission the NUI team would need to upload maps over the slow connection to study. Therefore, maps needed to be computed in real time and needed to be small file size. Additionally, the maps needed to be able to represent 3D structure like caves, cliffs, and ice sheets.
Typically, real time maps are 2D grids. To generate such a map all you need to do is average the depth value for each sonar detection that falls in a given cell. The problem with this method is you can’t represent vertical structure such as a cave or an ice sheet over the seafloor. Therefore a voxel-based octomap was used to represent the compressed data. The octomap divides the world into 3D “pixels” known as voxels allowing us to represent full 3d structure.
Testing without NUI
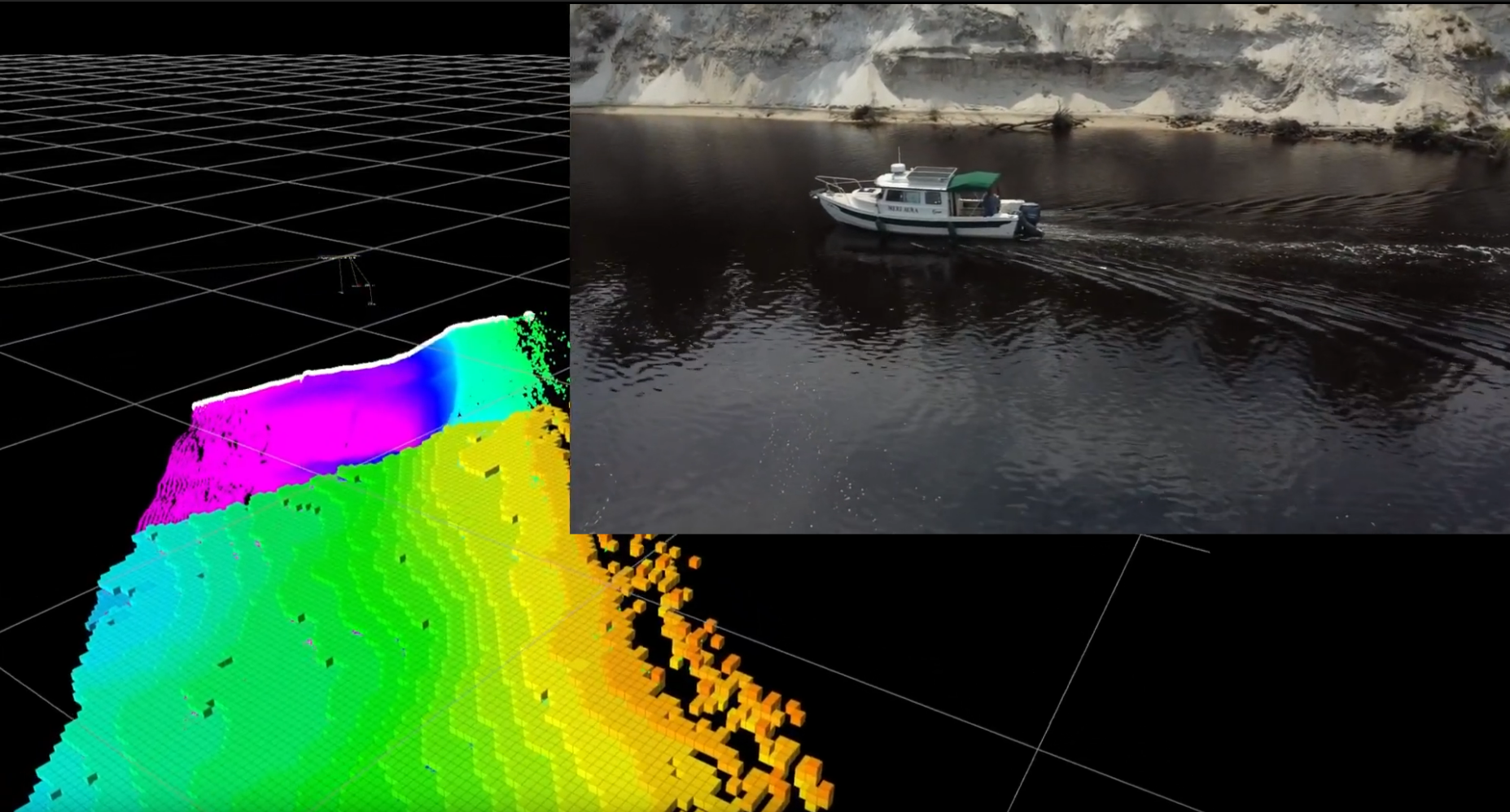
NUI was busy with missions during development time so testing directly on the vehicle was not possible. Therefore, NUI’s sonar was installed on the Seaward Science vessel Aura. All relevant software from NUI was installed on the ships computer and she was used as an analog to NUI. Below is a video of the testing process. You can see the raw sonar points being integrated into the octomap in real time.
Results
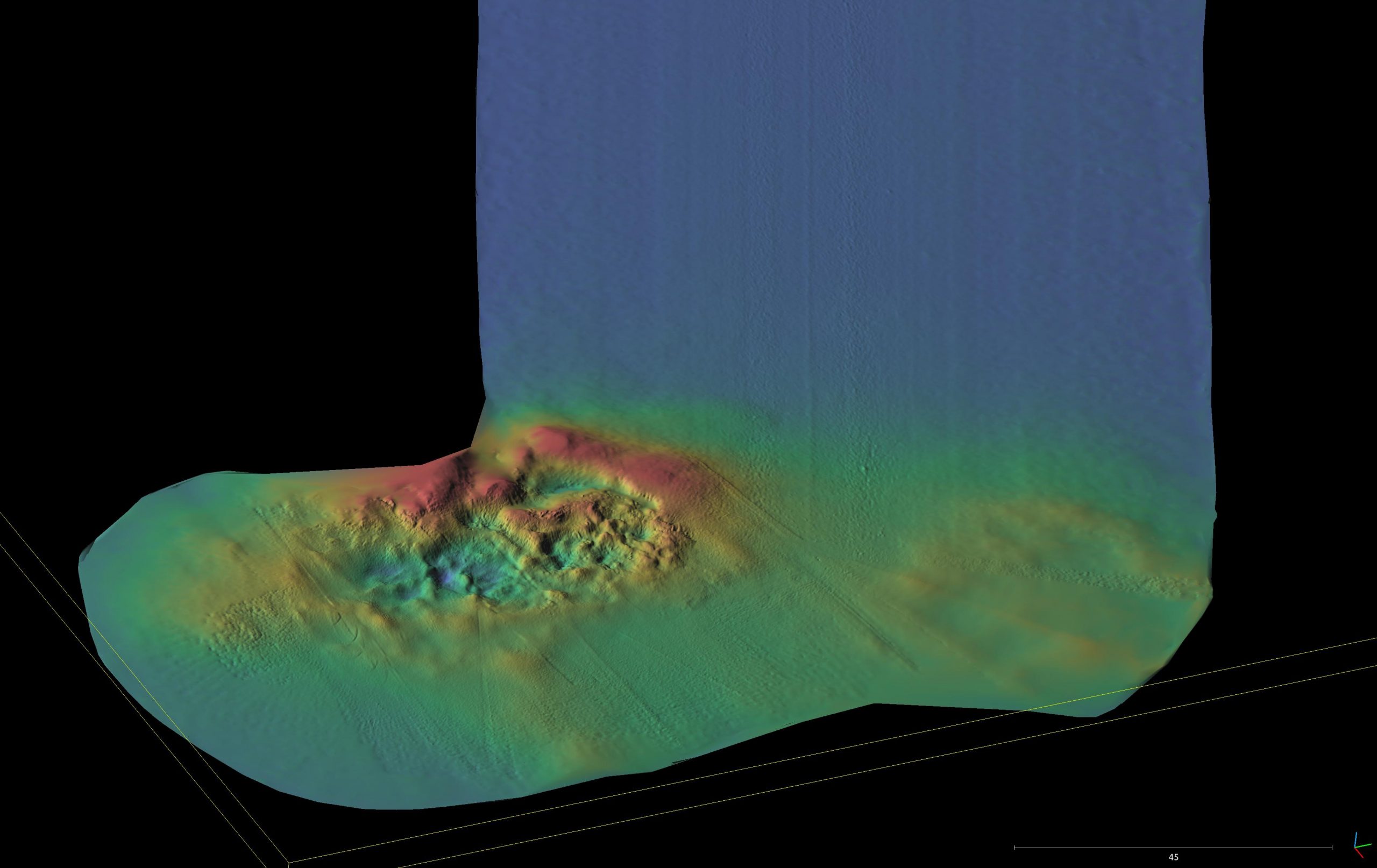
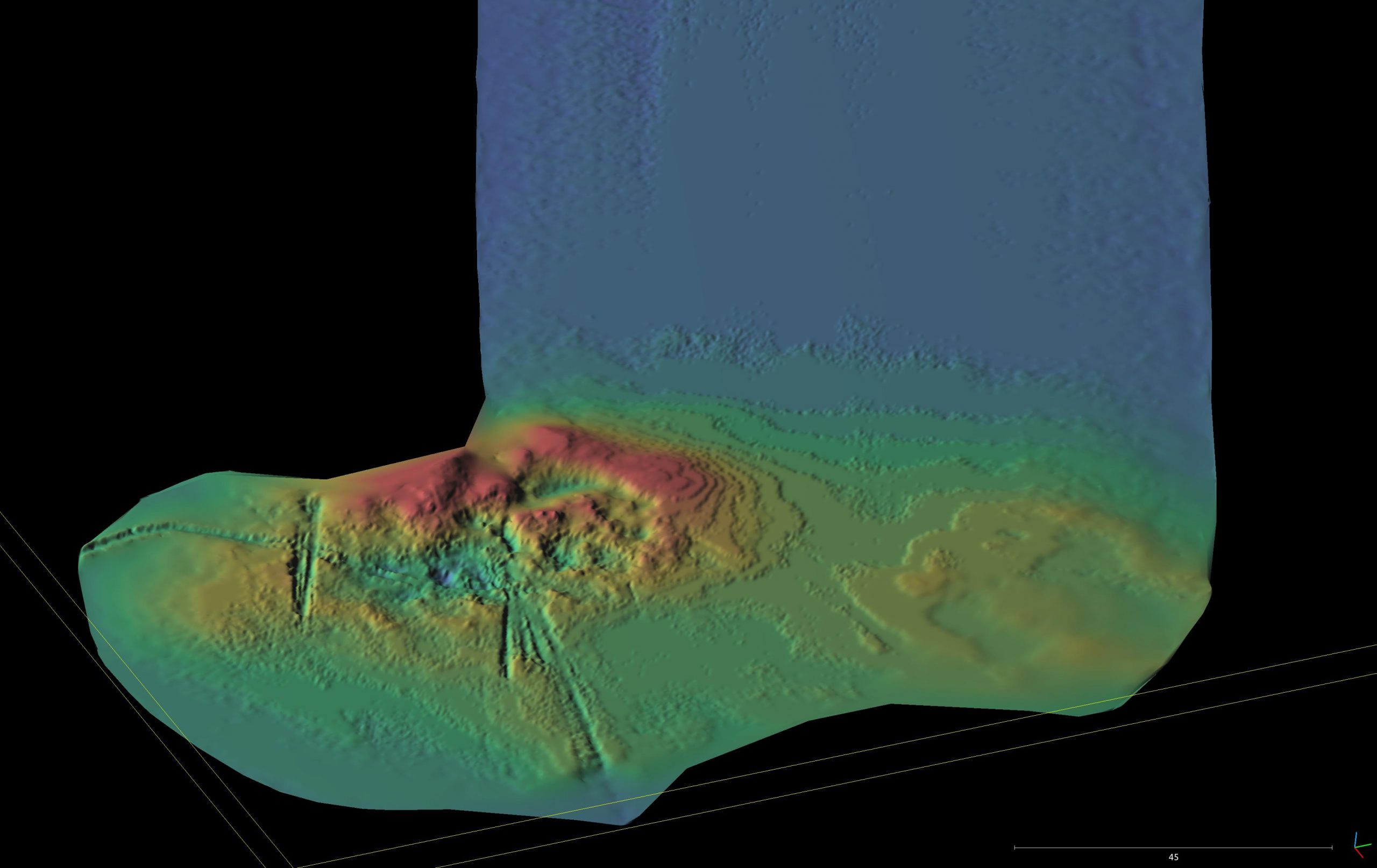
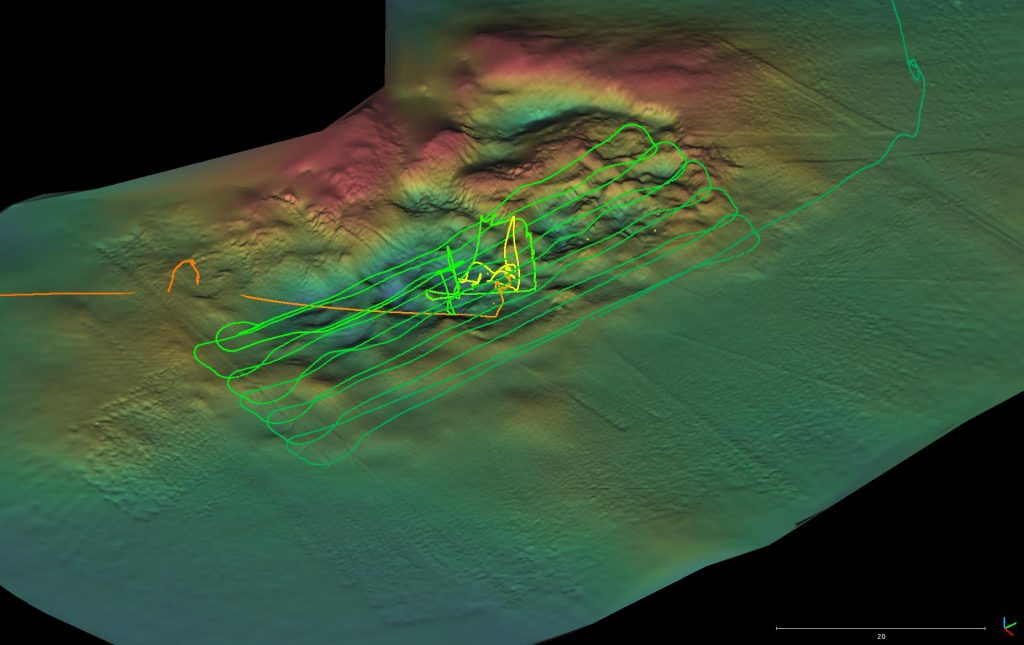
The software integrated with NUI with few snags. In the end NUI did 2 mapping missions on their short expedition using the software. Below you can compare the full resolution map (download upon NUI’s recovery) and the map available in real time. Although there is some loss in resolution, the octomap provides ample precision for future mission planning. Additionally the data was compressed from the 868 MB raw data to only 3.5MB in the octomap.
No responses yet