Dr. Kristopher Krasnosky
Ph.D. Oceanography, Marine Robotics and mapping focus
10 Years of deep-sea, coastal oceanographic/hydrographic field Experience.
Master 100 Ton near coastal Captain’s license with sailing endorsement
Commercial UAS (drone) certification
Private pilot license with sailplane and seaplane endorsement
Recent Projects


Education
University of Rhode Island / Ph.D. in Oceanography
January 2016 – December 2020, Roman Lab, Narragansett, RI
Completed dissertation in machine learning and SLAM relating to bathymetric mapping optimized with massively parallel programming.
Worked with the Roman Lab (Dr. Christopher Roman) on additional projects in remote sensing, vehicle control, sensor integration, and online mapping.
University of Hawaii at Manoa/ Ph.D Student in Mechanical Engineering
August 2014 – August 2015, Field Robotics Lab, Honolulu, HI
Focused on robotics, controls and remote sensing in a marine environment with the Field Robotics Lab (Dr. Brian Bingham).
Transferred to University of Rhode island when the Field Robotics Lab shut down in 2015.
Drexel University/ MS in Mechanical Engineering
August 2012 – May 2014, Drexel Autonomous Systems Lab, Philadelphia, PA
Completed a masters thesis on autonomous terrestrial vehicle navigation, mapping and path planning at the Drexel Autonomous Systems Lab (Dr. Paul Oh).
Ohio Wesleyan University/ BA in Physics
August 2006 – August 1010, Delaware, OH
Received a BA in Physics with a minor in computer science.
Software Development
Paradigms
Object oriented programming, event driven programming, asynchronous programming, parallel programming, massively parallel (GPU) programming.
Languages
Extensive experience: C++, CUDA, Python, Mathematica
Previously used: Swift, Objective-C, Matlab, PHP, HTML, CSS
Libraries
Extensive experience: Robot Operating System (ROS), Point Cloud Library (PCL), Open CV, QT, LCM, CMake
Open Source Contributions
ROS2Sonic: Developed and maintain ROS2 Driver for R2Sonic Multibeam sonars
ROS Hydrographic_Msgs: Defined standard ROS data types for Multibeam Sonars
Acoustic Message Tools: Developed to provide visualization and processing for acoustic messages defined in the hydrographic_msgs project
Norbit ROS Driver: Developed and maintain a ROS driver for the Norbit Multibeam sonar. Recently converted to Hydrgraphic_msgs standard.
Software
Bathymetry, GIS and 3d reconstruction/visualization software: Qimera, QGIS, CloudCompare, ColMap (structure from motion), and Meshlab.
Graphic design and animation: Photoshop, Illustrator, Inkscape, After Effects
CAD: Fusion 360, Onshape
Operating Systems
Linux, MacOS, Windows
Work Experience
University of South Florida / Senior Researcher in Ocean Mapping
November 2022 – 2023, St. Petersburg FL
University of Rhode Island / Postdoctoral Fellow
March 2021 – November 2022, Narragansett RI
At this position I am developing a user interface for the bathymetric mapping software developed for my dissertation for NOAA and the OECI.
Ocean Exploration Trust / Navigator and high-res mapping specialist Contractor
July 2016 – PRESENT, Pacific Ocean
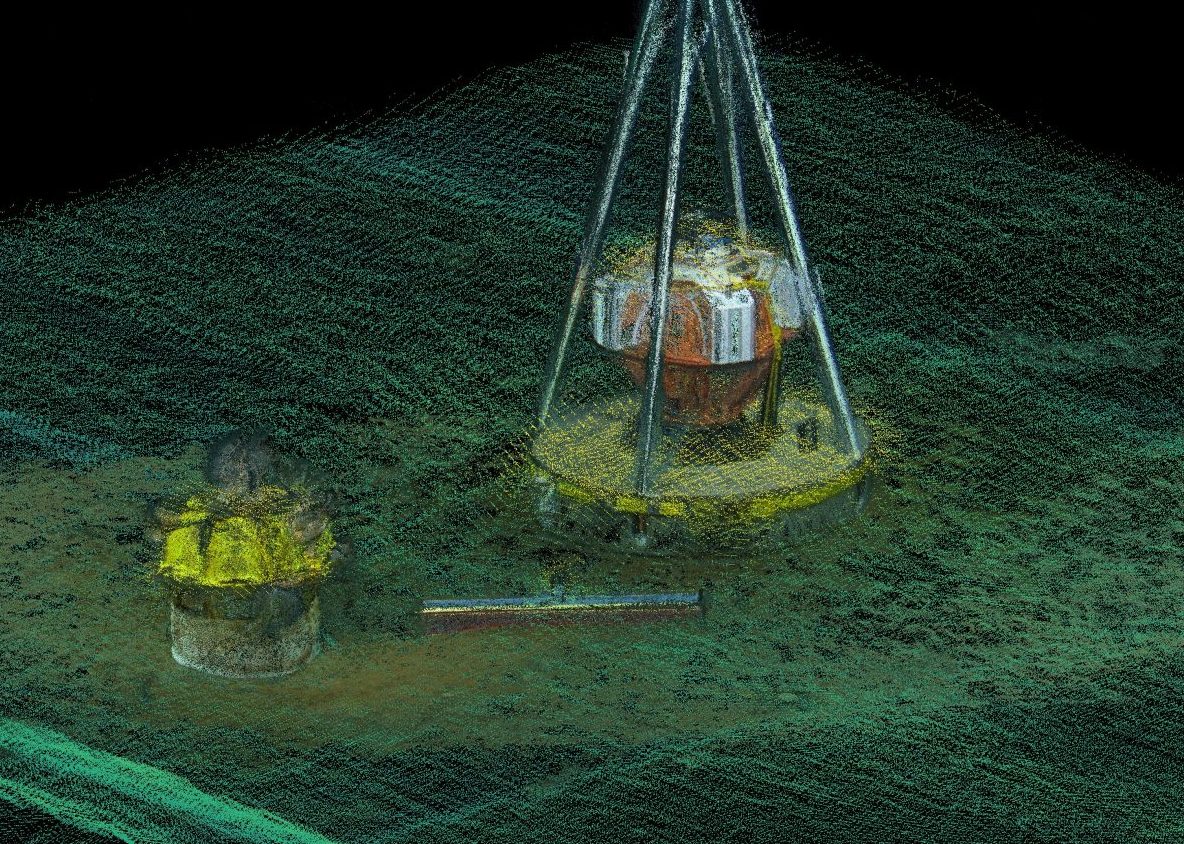
I initially began with OET as an ROV navigator. Because of my experience with the Roman Lab, I was assigned various tasks in high resolution mapping and vehicle navigation. Tasks include: stereo vision, structured light mapping, structure from motion photogrammetry, high-resolution multibeam mapping, and developing a ROS based navigation and mapping system for their ROV Hercules.
Fairwind Sailing School / Captain
May 2011 – Aug 2014, Sandusky OH
As captain I was responsible for the safe operation of sailing vessels from 27-46ft with 2-6 passengers aboard. I was responsible for the safety and education of passengers during lessons/charters living aboard for 3-6 days at a time. Finally, I was responsible for the maintenance of the fleet of 2-4 vessels between charters.
Business
Far5 Enterprises LLC / President and Founder
March 2012 – PRESENT
Far5 Enterprises was founded as a marine services company. Initially it was used to operate sailing charters from my 32ft sailing vessel in Philadelphia during my tenure at Drexel. Later, I chartered my 42ft sailing vessel in Honolulu during my tenure at University of Hawaii.
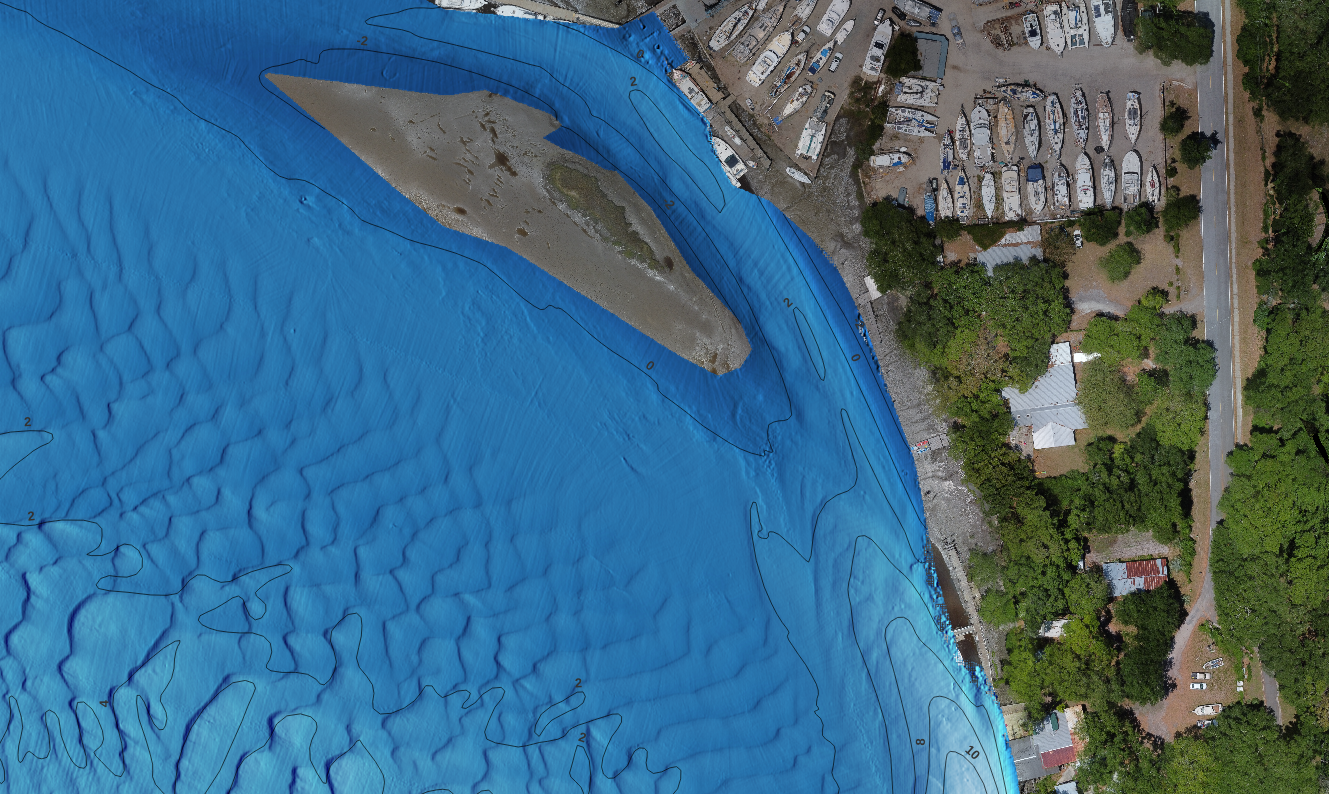
As my experience grew Far5 (DBA Seaward Science) developed a ROS based survey vessel offering high resolution surveys ( example). Far5 also provides mapping consultation services and software development for OET and Woods Hole Oceanographic Institution among others.
Technology
Extensive experience in sensor integration: navigation sensors (DVL, AHRS, GPS), perceptual sensors (Multibeam, LIDAR, machine vision cameras), sensor/nav calibration, computer networking, binary data processing
Experienced in electronics, wiring, serial communications
Fabrication experience: CAD/CAM, Laser/Plasma cutting, 3D Printing
IT Experience: Long-range field wireless communications, server configuration, network design/configuration, web service management/configuration, DNS configuration, DHCP configuration.
Maritime
Seamanship
Over 600 days as Captain (recreationally and professionally) at sea operating throughout the Great Lakes, East Coast, Hawaii and Caribbean on a variety of power and sailing vessels.
Operated Faraway5 Adventures based in Honolulu on my 42’ sloop. Offered charters, boat deliveries and lessons since early 2012
Captained and maintained 27’-46’ vessels for Fairwind Sailing for 4 years on the Great Lakes, operating charters or lessons with 2-6 passengers for up to a week at a time.
Maintenance and Upgrades
Electronics installation: navigation equipment, radar, wind turbine, solar panels, AIS, SSB, reverse osmosis system, air conditioning, power wiring.
Maintenance: Composites fabrication and repair, diesel maintenance, outboard repair/installation, woodwork restoration, canvas fabrication/repair, sail repair, sanitation system repair/replacement.
Publicaitons
First Author
A Massively Parallel Implementation of Gaussian Process Regression for Real Time Bathymetric Modeling and Simultaneous Localization and Mapping
2022 – Field Robotics (accepted, pending publication)
A bathymetric mapping and SLAM dataset with high-precision ground truth for marine robotics
2021 – The International Journal of Robotics Research
Contributor
Localization of a drifting underwater vehicle using a terrain-based particle filter
2019 – OCEANS
Evaluation of ocean plume characteristics using unmanned surface vessels
2018 – 2018 13th World Congress on Intelligent Control and Automation (WCICA)
Submerged Sea Caves of Southern California’s Continental Borderland
2018 – Oceanography (Washington, D.C.), Vol.31(1)
Robotic experiments to evaluate ocean plume characteristics and structure
2017 – OCEANS
Correlating sea level rise still-stands to marine terraces and undiscovered submerged shoreline features in the Channel Islands (USA) using autonomous and remotely operated systems
2017 – AGU Fall Meeting Abstracts. Vol. 2017. 2017.
Other Projects
NOAA OECI Stochastic Bathymetry GUI
2021-2022, University of Rhode Island
Developing a user interface for the bathymetric mapping software developed for my dissertation for NOAA and the OECI. This interface will allow NOAA, the OECI and collaborators to produce improved terrain models using Gaussian process regression (GPR). This method also automatically filters outliers, estimates uncertainty of the map and gracefully interpolates areas with reduced coverage.
Hydrographic Messages Standards
2021-PRESENT, Personal
Collaborating with OSU Applied Physics Laboratory, Naval Postgraduate School, and University of New Hampshire CCOM to create a set of ROS message standards for hydrography and oceanography. My major contributions were to the acoustic messages such as multibeam sonar detections and datatypes. ( https://github.com/apl-ocean-engineering/hydrographic_msgs)
Improved ROS ROV Navigation and Mapping
2021, OET
Created a completely new ROS-based navigation system for the ROV Hercules based on the Pontoon of Science system. Created new ROS drivers for all relevant vehicle sensors.
Your Autonomous Kayak (YAK)
2020 – 2022, Roman Lab
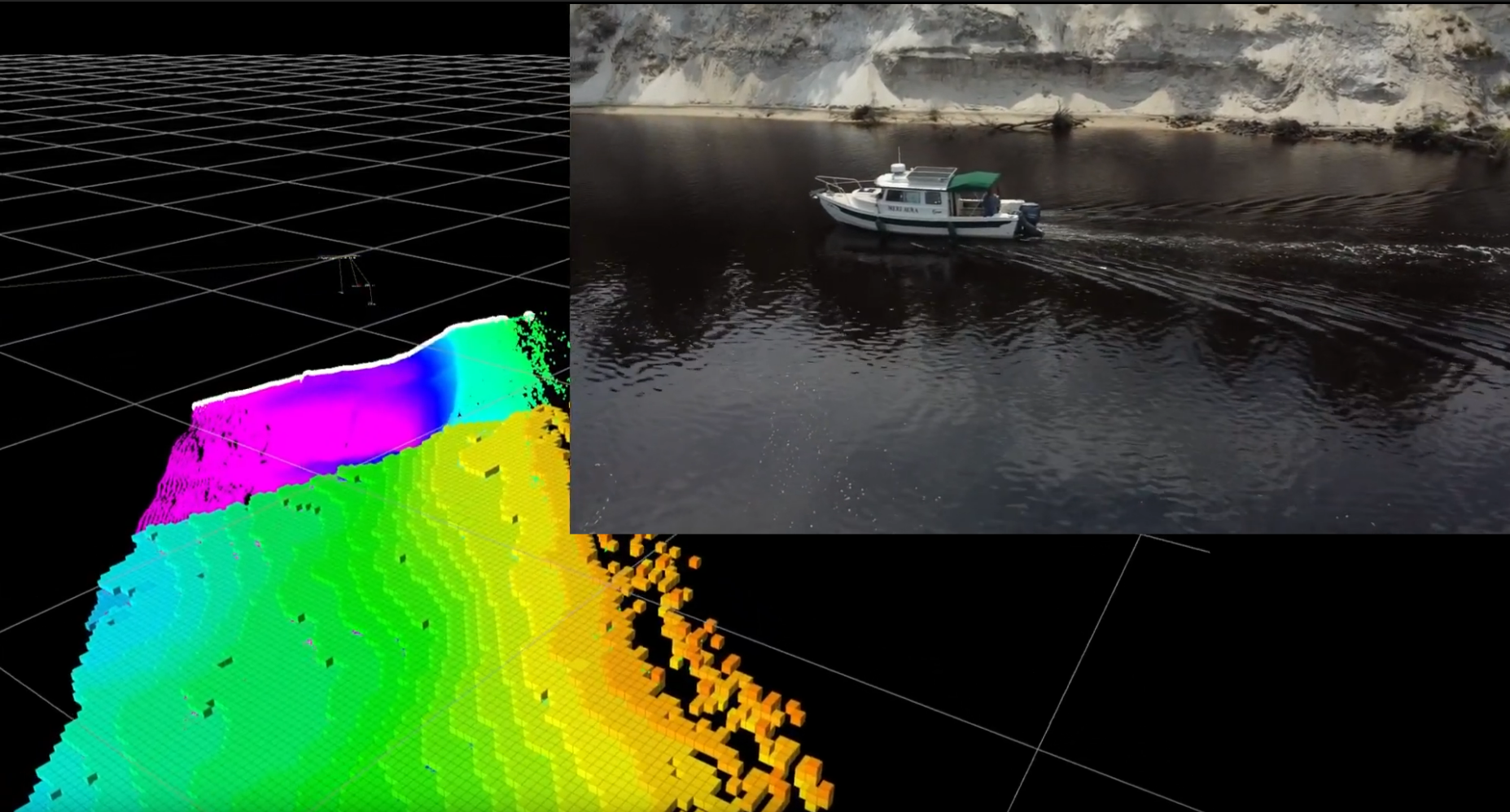
Integrated a WASSP sonar, vehicle navigation, wireless communications and remote operation on the Roman Lab ASV, YAK. The vehicle was able to autonomously follow a trajectory. YAK was in wireless communication with Survey Vessel Meri Aura where operators could view map data in real time. ( youtu.be/GelTVqjT_ZM)
PhD Dissertation
2016 – 2020, Roman Lab
Developed a GPU/CUDA implementation of Gaussian process regression (GPR) resulting in 100’s-1000’s of times speed up over existing implementations. This project is used to generate high-resolution maps of the seafloor with uncertainty predictions in post por in real time.
This GPR implementation was later used in terrain matching in a particle filter based featureless SLAM algorithm. ( digitalcommons.uri.edu/oa_diss/1289/)
Pontoon of Science (POS) Development and Dataset
2019 – 2020, Far5 Enterprises and Roman Lab
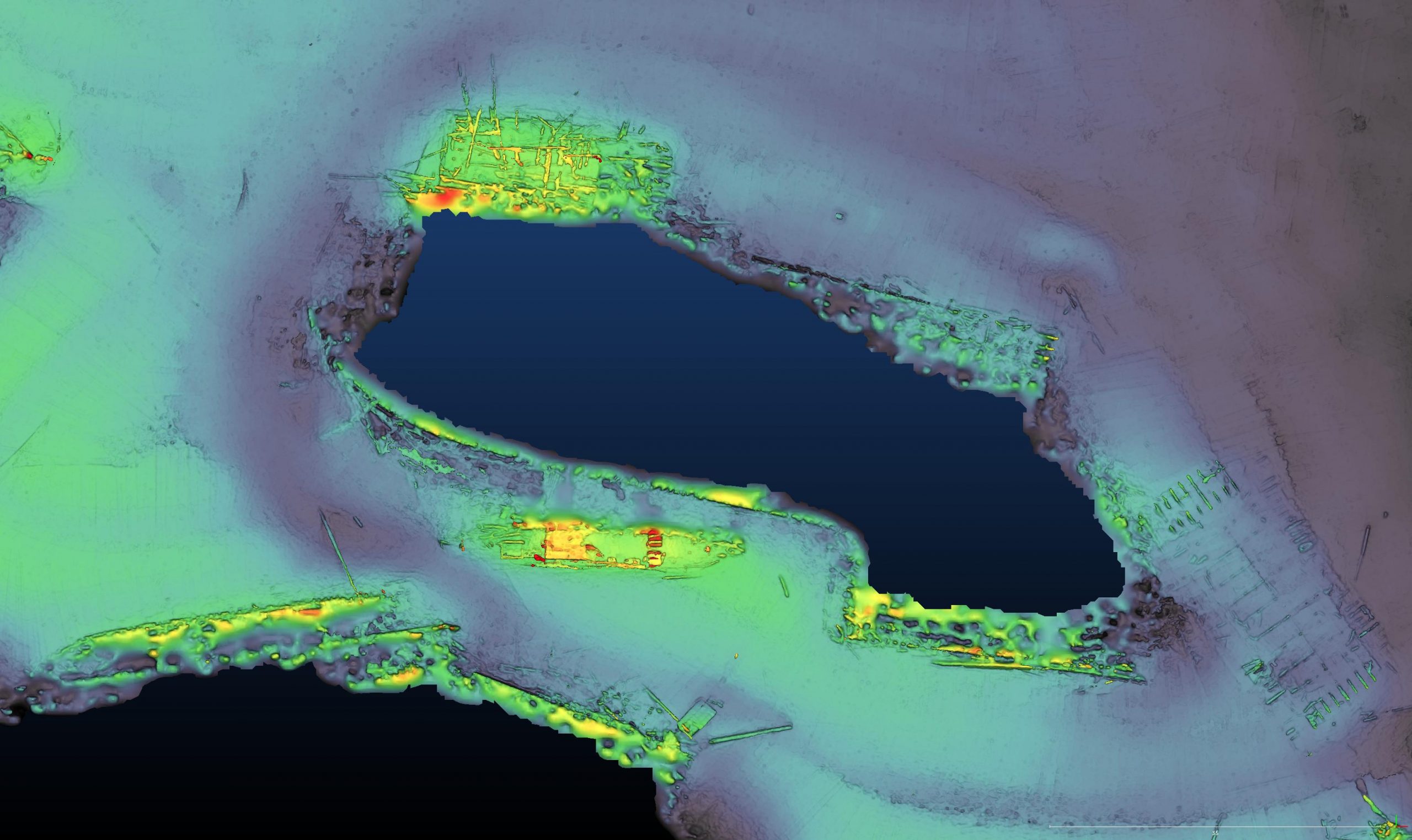
Developed a surface vessel to perform high precision mapping tasks. This system, known as the Pontoon Of Science (POS), Included an AHRS, DVL, RTK GPS, a Norbit multibeam and a WASSP Multibeam. The POS was used to create high-resolution maps. Because it also included a DVL, the POS was used as an analog to an AUV. Using AUV analog datasets SLAM algorithms could be tested and compared with the RTK GPS ground truth.
The datasets from this projects were made available the community ( seaward.science/data/pos/)
Search for Amelia Earheart
2019, E/V Nautilus – Nikumaroro Island -Kiribati
Operated laser mapping and photogrammetry system for the National Geographic cruise to find the wreckage of Amelia Earheart’s aircraft. Additionally worked as a navigator and side scan operator.
NASA SUBSEA Cruise Acoustic Mapping
2019, E/V Nautilus – Gorda Ridge -CA
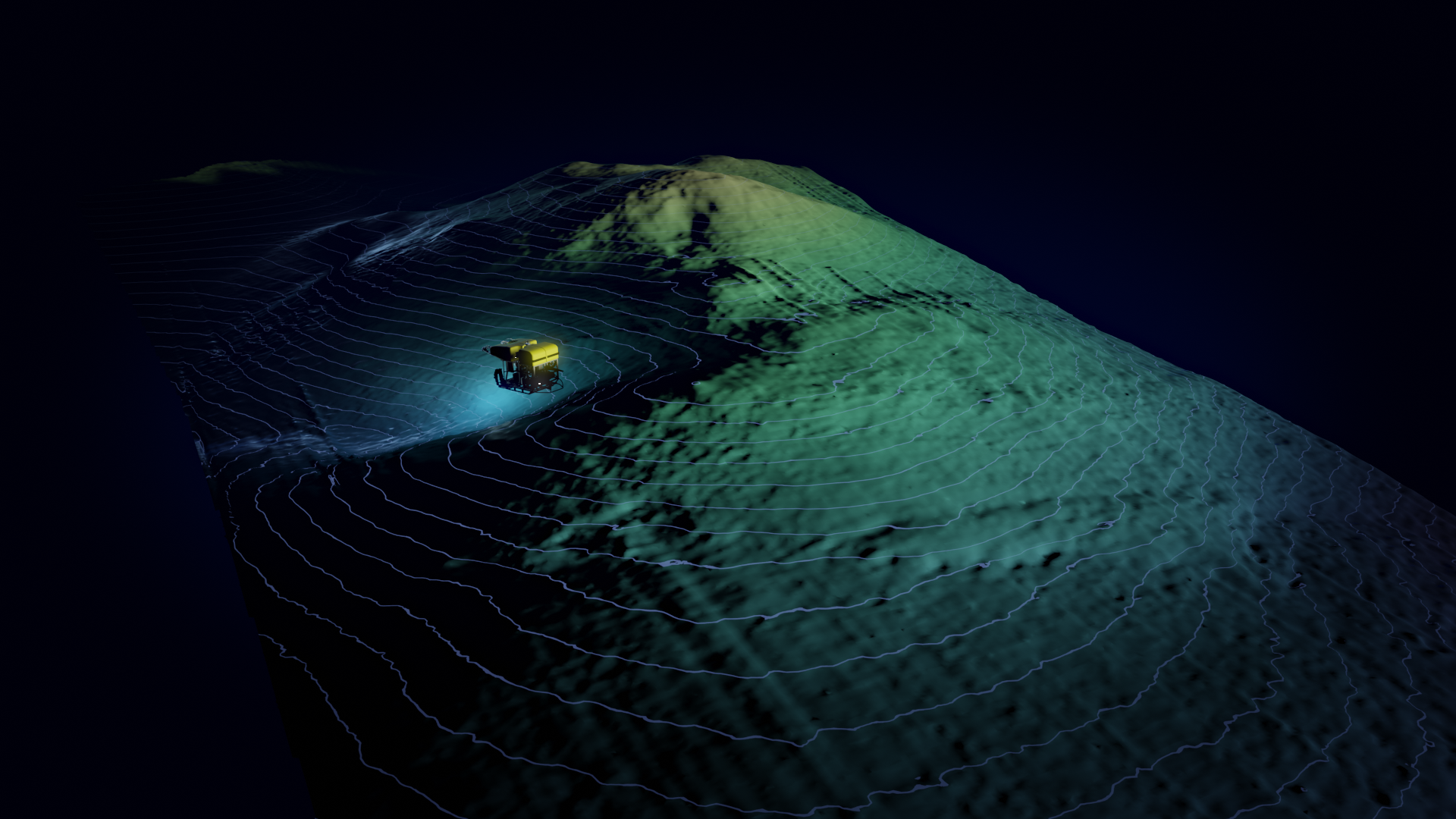
Extend the real time laser mapping system to support real time multibeam mapping aboard the ROV Hercules. Several maps were produced for the NASA SUBSEA team including one of the newly discovered Apollo Vent FIeld. ( youtu.be/6xlzCAheVD0)
NASA SUBSEA Cruise Laser Mapping
2018, E/V Nautilus – Kamaʻehuakanaloa – HI
Developed and integrated a custom ROS package with ROV Hercules and E/V Nautilus to perform online mapping, localization, and visualization of the vehicle and seafloor. ( youtu.be/ahehDKkcPts)
Real Time Structured Light Laser
2017, E/V Nautilus – Channel Islands National Marine Sanctuary
Developed real time laser structured light laser
processing pipeline and waterfall (no navigation included) visualization using QT. ( youtu.be/guMy97HShnI)
Lagrangian Float
2018, RV Falkor – Hawaii
Provided engineering support and performed deck operations for the Roman Lab Lagrangian photo float near Big Island Hawaii.
Nautilus ROV Navigator
2016, 2017, 2018, 2019, 2021, E/V Nautilus
Worked as ROV navigator for E/V Nautilus coordinating ship movements with the needs of the ROV pilots and science goals. Additionally worked on shipboard multibeam processing, planning and acquisition. ( nautiluslive.org/people/kristopher-krasnosky)
Wire Flyer
2016, RV Oceanus – 2017, RV Atlantis , Roman Lab
Assisted in deployment, deck operations, and software development (Python and QT) of the Roman Lab “Wire Flyer” AUV. ( youtu.be/oax3B8PJY74)
ASV Plume Tracking/formation keeping
2015, Field Robotics Lab
Collaborated with Stevens Institute for a plume tracking experiment. I implemented formation keeping using existing LCM infrastructure and visualization using ROS. ( vimeo.com/132397213)
Masters degree
2014, Drexel Autonomous Systems Lab
Implemented and compared potential field navigation techniques on a “Festo Robotino” omni-drive robotic platform using ROS and SLAM Packages. ( youtu.be/A066UdfSgIs)
Autonomous Air Duct Vehicle
2013, Drexel Autonomous Systems Lab
Designed, constructed, and programmed autonomous air duct navigation platform to sense radiation aboard naval vessels. ( youtu.be/tU2zyrExpes)